

מבוא לשבב מחלקת בקרה
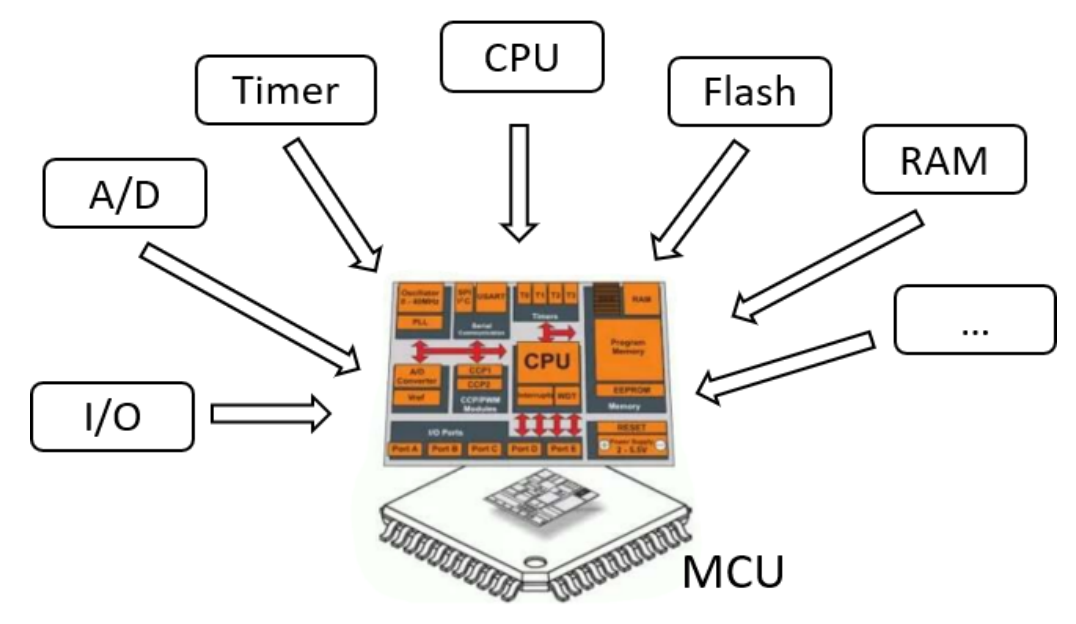
שבב הבקרה מתייחס בעיקר ל-MCU (יחידת מיקרו-בקר), כלומר, המיקרו-בקר, המכונה גם שבב יחיד, נועד להפחית את תדר המעבד ואת המפרט בהתאם, ולשלב את הזיכרון, הטיימר, המרת A/D, השעון, יציאת קלט/פלט ותקשורת טורית ומודולים פונקציונליים וממשקים אחרים בשבב יחיד. בהתחשב בפונקציית בקרת הטרמינל, הוא נהנה מיתרונות של ביצועים גבוהים, צריכת חשמל נמוכה, גמישות גבוהה וניתנת לתכנות.
דיאגרמת MCU של רמת מד הרכב
רכב הוא תחום יישום חשוב מאוד של מיקרו-בקר (MCU), על פי נתוני IC Insights, בשנת 2019, יישום המיקרו-בקר העולמי באלקטרוניקה לרכב היווה כ-33%. מספר המיקרו-בקרים המשמשים כל מכונית בדגמים יוקרתיים קרוב ל-100, החל ממחשבי נהיגה, מכשירים עם צגי LCD, ועד למנועים, שלדות, רכיבים גדולים וקטנים במכונית הזקוקים לבקרת מיקרו-בקר.
בימים הראשונים, מיקרו-בקרים (MCUS) של 8 ו-16 סיביות שימשו בעיקר ברכבים, אך עם השיפור המתמיד של האלקטרוניזציה והאינטליגנציה של הרכב, גם מספר ואיכות ה-MCUS הנדרשים הולכים וגדלים. כיום, חלקם של מיקרו-בקרים של 32 סיביות ברכבים הגיע לכ-60%, מתוכם ליבת סדרת Cortex של ARM, בשל עלותה הנמוכה ובקרת ההספק המצוינת שלה, היא הבחירה המרכזית של יצרני מיקרו-בקרים לרכב.
הפרמטרים העיקריים של מיקרו-בקר לרכב כוללים מתח הפעלה, תדר הפעלה, קיבולת זיכרון RAM וזיכרון RAM, מודול טיימר ומספר ערוץ, מודול ADC ומספר ערוץ, סוג ומספר ממשק תקשורת טורית, מספר יציאת קלט/פלט, טמפרטורת הפעלה, צורת האריזה ורמת בטיחות פונקציונלית.
לפי ביטים של המעבד, ניתן לחלק את MCUS לרכב בעיקר ל-8 ביטים, 16 ביטים ו-32 ביטים. עם שדרוג התהליך, עלות MCUS של 32 סיביות ממשיכה לרדת, וכעת היא הפכה למיינסטרים, והיא מחליפה בהדרגה את היישומים והשווקים שנשלטו בעבר על ידי MCUS של 8/16 סיביות.
אם מחולקים לפי תחום היישום, ניתן לחלק את המיקרו-בקר לרכב לתחום המרכב, תחום ההספק, תחום השלדה, תחום תא הטייס ותחום ההנעה החכמה. עבור תחום תא הטייס ותחום ההנעה החכמה, המיקרו-בקר זקוק לכוח מחשוב גבוה וממשקי תקשורת חיצוניים במהירות גבוהה, כגון CAN FD ו-Ethernet. תחום המרכב דורש גם מספר רב של ממשקי תקשורת חיצוניים, אך דרישות כוח המחשוב של המיקרו-בקר נמוכות יחסית, בעוד שתחום ההספק ותחום השלדה דורשים רמות טמפרטורת פעולה ובטיחות פונקציונלית גבוהות יותר.
שבב בקרת תחום שלדה
תחום השלדה קשור לנהיגה ברכב ומורכב ממערכת תיבת הילוכים, מערכת נהיגה, מערכת היגוי ומערכת בלימה. הוא מורכב מחמש תת-מערכות, דהיינו היגוי, בלימה, החלפת הילוכים, מצערת ומערכת מתלים. עם התפתחות אינטליגנציית הרכב, זיהוי תפיסה, תכנון החלטות וביצוע בקרה של כלי רכב חכמים הם מערכות הליבה של תחום השלדה. היגוי באמצעות חוט (steering by wire) ודחיפת חוט (drive by wire) הם המרכיבים המרכזיים בצד הביצועי של נהיגה אוטומטית.
(1) דרישות התפקיד
יחידת המיקרו-בקר של תחום השלדה משתמשת בפלטפורמת בטיחות פונקציונלית בעלת ביצועים גבוהים וניתנת להרחבה ותומכת באשכול חיישנים ובחיישנים אינרציאליים מרובי צירים. בהתבסס על תרחיש יישום זה, מוצעות הדרישות הבאות עבור יחידת המיקרו-בקר של תחום השלדה:
· דרישות תדר גבוה וכוח מחשוב גבוה, התדר העיקרי אינו פחות מ-200 מגה-הרץ וכוח המחשוב אינו פחות מ-300 DMIPS
· שטח אחסון פלאש אינו פחות מ-2MB, עם מחיצה פיזית של קוד פלאש ופלאש נתונים;
· זיכרון RAM לא פחות מ-512KB;
· דרישות רמת בטיחות פונקציונלית גבוהה, יכולות להגיע לרמת ASIL-D;
· תמיכה ב-ADC מדויק של 12 סיביות;
· תמיכה בטיימר של 32 סיביות בדיוק גבוה וסנכרון גבוה;
· תמיכה ב-CAN-FD רב-ערוצי;
· תמיכה ב-100M Ethernet לפחות;
· אמינות שאינה נמוכה מ-AEC-Q100 Grade1;
· תמיכה בשדרוג מקוון (OTA);
· תמיכה בפונקציית אימות קושחה (אלגוריתם סודי לאומי);
(2) דרישות ביצועים
· חלק הליבה:
א. תדר ליבה: כלומר, תדר השעון כאשר הליבה פועלת, המשמש לייצוג מהירות תנודת אות הדופק הדיגיטלי של הליבה, והתדר העיקרי אינו יכול לייצג ישירות את מהירות החישוב של הליבה. מהירות פעולת הליבה קשורה גם לצינור הליבה, למטמון, לערכת ההוראות וכו'.
II. כוח מחשוב: בדרך כלל ניתן להשתמש ב-DMIPS להערכה. DMIPS היא יחידה המודדת את הביצועים היחסיים של תוכנית הביצועים המשולבת של המיקרו-בקר כאשר היא נבדקת.
· פרמטרים של זיכרון:
א. זיכרון קוד: זיכרון המשמש לאחסון קוד;
II. זיכרון נתונים: זיכרון המשמש לאחסון נתונים;
III.RAM: זיכרון המשמש לאחסון נתונים וקוד זמניים.
· אפיק תקשורת: כולל אפיק מיוחד לרכב ואפיק תקשורת קונבנציונלי;
· ציוד היקפי מדויק;
· טמפרטורת פעולה;
(3) דפוס תעשייתי
מכיוון שהארכיטקטורה החשמלית והאלקטרונית בה משתמשות יצרניות רכב שונות תשתנה, דרישות הרכיבים עבור תחום השלדה ישתנו. עקב התצורה השונה של דגמים שונים של אותו מפעל רכב, בחירת ה-ECU של תחום השלדה תהיה שונה. הבחנות אלו יביאו לדרישות MCU שונות עבור תחום השלדה. לדוגמה, הונדה אקורד משתמשת בשלושה שבבי MCU בתחום השלדה, ואאודי Q7 משתמשת בכ-11 שבבי MCU בתחום השלדה. בשנת 2021, ייצור מכוניות נוסעים של המותג הסיני עומד על כ-10 מיליון, מתוכם הביקוש הממוצע ל-MCUS בתחום שלדות אופניים הוא 5, והשוק הכולל הגיע לכ-50 מיליון. הספקים העיקריים של MCUS בתחום השלדה הם Infineon, NXP, Renesas, Microchip, TI ו-ST. חמשת ספקי המוליכים למחצה בינלאומיים אלה מהווים יותר מ-99% משוק MCUS בתחום השלדה.
(4) חסמים בתעשייה
מנקודת מבט טכנית מרכזית, רכיבי תחום השלדה כגון EPS, EPB, ESC קשורים קשר הדוק לבטיחות חיי הנהג, ולכן רמת הבטיחות התפקודית של המיקרו-בקר בתחום השלדה היא גבוהה מאוד, בעיקרון דרישות רמת ASIL-D. רמת בטיחות תפקודית זו של מיקרו-בקר אינה קיימת בסין. בנוסף לרמת הבטיחות התפקודית, לתרחישי היישום של רכיבי השלדה יש דרישות גבוהות מאוד לתדר המיקרו-בקר, כוח מחשוב, קיבולת זיכרון, ביצועי היקפי, דיוק היקפי והיבטים אחרים. המיקרו-בקר בתחום השלדה יצר מחסום גבוה מאוד בתעשייה, אשר דורש מיצרני מיקרו-בקרים מקומיים לאתגר ולשבור אותו.
מבחינת שרשרת האספקה, עקב דרישות התדר הגבוה וכוח המחשוב הגבוה עבור שבב הבקרה של רכיבי תחום המארז, מוצגות דרישות גבוהות יחסית לתהליך ותהליך ייצור הוופלים. נכון לעכשיו, נראה כי נדרש תהליך של לפחות 55 ננומטר כדי לעמוד בדרישות תדר המיקרו-בקר מעל 200 מגה-הרץ. מבחינה זו, קו הייצור המקומי של המיקרו-בקר אינו שלם ולא הגיע לרמת ייצור המוני. יצרני מוליכים למחצה בינלאומיים אימצו בעיקרון את מודל IDM, מבחינת בתי יציקה של הוופלים, נכון לעכשיו רק TSMC, UMC ו-GF מחזיקות ביכולות המתאימות. יצרני השבבים המקומיים הם כולם חברות Fabless, וישנם אתגרים וסיכונים מסוימים בייצור הוופלים והבטחת קיבולת.
בתרחישי מחשוב מרכזיים כמו נהיגה אוטונומית, קשה להתאים מעבדים מסורתיים לדרישות מחשוב בינה מלאכותית עקב יעילות המחשוב הנמוכה שלהם, ולשבבי בינה מלאכותית כמו GPU, FPgas ו-ASic יש ביצועים מצוינים בקצה ובענן עם מאפיינים משלהם והם נמצאים בשימוש נרחב. מנקודת מבט של מגמות טכנולוגיות, GPU עדיין יהיה שבב הבינה המלאכותית הדומיננטי בטווח הקצר, ובטווח הארוך, ASIC הוא הכיוון האולטימטיבי. מנקודת מבט של מגמות שוק, הביקוש העולמי לשבבי בינה מלאכותית ישמור על תנופת צמיחה מהירה, ולשבבי ענן וקצה יש פוטנציאל צמיחה גדול יותר, וקצב צמיחת השוק צפוי להיות קרוב ל-50% בחמש השנים הקרובות. למרות שהבסיס של טכנולוגיית השבבים המקומית חלש, עם הנחיתה המהירה של יישומי בינה מלאכותית, הביקוש המהיר לשבבי בינה מלאכותית יוצר הזדמנויות לצמיחת טכנולוגיה ויכולות של מפעלי שבבים מקומיים. לנהיגה אוטונומית יש דרישות מחמירות לגבי כוח מחשוב, השהייה ואמינות. כיום, פתרונות GPU+FPGA נמצאים בשימוש בעיקר. עם יציבות האלגוריתמים ומונע נתונים, ASic צפויים לצבור שטח שוק.
נדרש הרבה מקום על שבב המעבד לחיזוי ואופטימיזציה של ענפים, מה שחוסך מצבים שונים כדי להפחית את זמן ההשהיה של מיתוג המשימות. זה גם הופך אותו מתאים יותר לבקרת לוגיקה, פעולה טורית ותפעול נתונים כללי. קחו לדוגמה את ה-GPU וה-CPU. בהשוואה ל-CPU, ה-GPU משתמש במספר רב של יחידות מחשוב ובצינור ארוך, לוגיקת בקרה פשוטה מאוד ומבטל את המטמון. ה-CPU לא רק תופס הרבה מקום על ידי המטמון, אלא גם לוגיקת בקרה מורכבת ומעגלי אופטימיזציה רבים, בהשוואה לכך שכוח המחשוב הוא חלק קטן בלבד.
שבב בקרת תחום הספק
בקר תחום הספק הוא יחידת ניהול מערכת הנעה חכמה. עם CAN/FLEXRAY ניתן לנהל את מערכת ההילוכים, את ניהול הסוללה, את ניטור ויסות האלטרנטור, והוא משמש בעיקר לאופטימיזציה ובקרה של מערכת ההינע, תוך אבחון תקלות חשמליות חכם, חיסכון באנרגיה חכם, תקשורת אפיק ופונקציות אחרות.
(1) דרישות התפקיד
מיקרו-בקר בקרת תחום הספק יכול לתמוך ביישומים עיקריים בתחום הספק, כגון BMS, עם הדרישות הבאות:
· תדר עיקרי גבוה, תדר עיקרי 600MHz ~ 800MHz
· זיכרון RAM בנפח 4 מגה-בייט
· דרישות רמת בטיחות פונקציונלית גבוהה, יכולות להגיע לרמת ASIL-D;
· תמיכה ב-CAN-FD רב-ערוצי;
· תמיכה ברשת 2G Ethernet;
· אמינות שאינה נמוכה מ-AEC-Q100 Grade1;
· תמיכה בפונקציית אימות קושחה (אלגוריתם סודי לאומי);
(2) דרישות ביצועים
ביצועים גבוהים: המוצר משלב את מעבד ה-Lock-Step הדו-ליבתי ARM Cortex R5 ו-SRAM מובנה בנפח 4MB כדי לתמוך בדרישות המחשוב והזיכרון הגדלות של יישומי רכב. מעבד ARM Cortex-R5F עד 800MHz. בטיחות גבוהה: תקן האמינות של מפרט הרכב AEC-Q100 מגיע לדרגה 1, ורמת הבטיחות הפונקציונלית ISO26262 מגיעה ל-ASIL D. מעבד ה-Lock-Step הדו-ליבתי יכול להשיג כיסוי אבחוני של עד 99%. מודול אבטחת המידע המובנה משלב מחולל מספרים אקראיים אמיתי, AES, RSA, ECC, SHA ומאיצי חומרה העומדים בתקנים הרלוונטיים של אבטחת מדינה ועסקית. שילוב פונקציות אבטחת מידע אלו יכול לענות על צרכי יישומים כגון הפעלה מאובטחת, תקשורת מאובטחת, עדכון ושדרוג קושחה מאובטחים.
שבב בקרת אזור גוף
אזור המרכב אחראי בעיקר על בקרת תפקודים שונים של המרכב. עם התפתחות הרכב, בקר אזור המרכב הולך וגובר, על מנת להפחית את עלות הבקר ולהפחית את משקל הרכב, יש צורך לשלב את כל המכשירים הפונקציונליים, החל מהחלק הקדמי, החלק האמצעי של המכונית והחלק האחורי של המכונית, כגון פנס הבלם האחורי, פנס המיקום האחורי, נעילת הדלת האחורית ואפילו מוט התמיכה הכפול לבקר אחד.
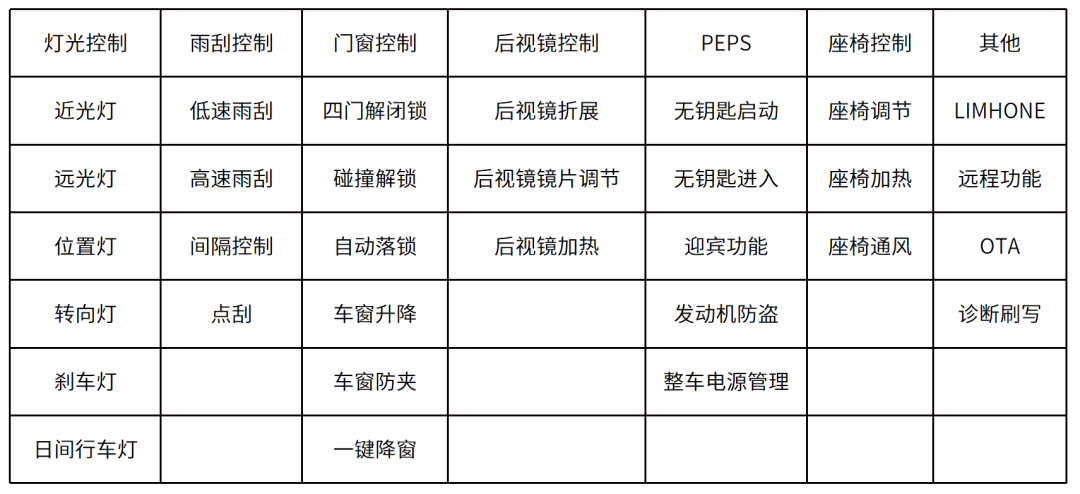
בקר שטח הגוף משלב בדרך כלל BCM, PEPS, TPMS, Gateway ופונקציות נוספות, אך יכול גם להרחיב את כוונון המושב, בקרת מראות האחוריות, בקרת המזגן ופונקציות נוספות, ניהול מקיף ומאוחד של כל מפעיל, הקצאה סבירה ויעילה של משאבי המערכת. פונקציותיו של בקר שטח הגוף הן רבות, כפי שמוצג להלן, אך אינן מוגבלות לאלו המפורטות כאן.
(1) דרישות התפקיד
הדרישות העיקריות של אלקטרוניקה לרכב עבור שבבי בקרה של מיקרו-בקר הן יציבות טובה יותר, אמינות, אבטחה, מאפיינים טכניים בזמן אמת ואחרים, כמו גם ביצועי מחשוב וקיבולת אחסון גבוהים יותר, ודרישות מדד צריכת חשמל נמוכות יותר. בקר שטח המרכב עבר בהדרגה מפריסה פונקציונלית מבוזרת לבקר גדול המשלב את כל ההינעים הבסיסיים של אלקטרוניקת המרכב, פונקציות מפתח, תאורה, דלתות, חלונות וכו'. תכנון מערכת בקרת שטח המרכב משלב תאורה, שטיפת מגבים, מנעולי דלתות בקרה מרכזית, חלונות ובקרות אחרות, מפתחות חכמים PEPS, ניהול צריכת חשמל וכו'. כמו כן, CAN שער, CANFD ו-FLEXRAY ניתנים להרחבה, רשת LIN, ממשק Ethernet וטכנולוגיית פיתוח ועיצוב מודולים.
באופן כללי, דרישות העבודה של פונקציות הבקרה שהוזכרו לעיל עבור שבב הבקרה הראשי של המיקרו-בקר באזור המרכב באות לידי ביטוי בעיקר בהיבטים של ביצועי מחשוב ועיבוד, אינטגרציה פונקציונלית, ממשק תקשורת ואמינות. מבחינת דרישות ספציפיות, עקב הבדלים פונקציונליים בתרחישי יישום פונקציונליים שונים באזור המרכב, כגון חלונות חשמליים, מושבים אוטומטיים, דלת תא מטען חשמלית ויישומי מרכב אחרים, עדיין קיימים צרכים לבקרת מנוע יעילה גבוהה, ויישומי מרכב כאלה דורשים שהמיקרו-בקר ישלב אלגוריתם בקרה אלקטרונית FOC ופונקציות אחרות. בנוסף, לתרחישי יישום שונים באזור המרכב יש דרישות שונות לתצורת הממשק של השבב. לכן, בדרך כלל יש צורך לבחור את המיקרו-בקר של אזור המרכב בהתאם לדרישות הפונקציונליות והביצועים של תרחיש היישום הספציפי, ועל בסיס זה, למדוד באופן מקיף את ביצועי עלות המוצר, יכולת האספקה והשירות הטכני וגורמים אחרים.
(2) דרישות ביצועים
מדדי הייחוס העיקריים של שבב המיקרו-בקר בקרת אזור הגוף הם כדלקמן:
ביצועים: ARM Cortex-M4F@ 144MHz, 180DMIPS, מטמון פקודות מובנה של 8KB, תמיכה בביצוע יחידת האצת פלאש תוכנית 0 המתנה.
זיכרון מוצפן בעל קיבולת גדולה: עד 512K בייט בזיכרון eFlash, תמיכה באחסון מוצפן, ניהול מחיצות והגנה על נתונים, תמיכה באימות ECC, 100,000 זמני מחיקה, 10 שנות שמירת נתונים; 144K בייט בזיכרון SRAM, תמיכה בזוגיות חומרה.
ממשקי תקשורת עשירים משולבים: תמיכה ב-GPIO רב-ערוצי, USART, UART, SPI, QSPI, I2C, SDIO, USB2.0, CAN 2.0B, EMAC, DVP וממשקים אחרים.
סימולטור משולב בעל ביצועים גבוהים: תמיכה ב-ADC במהירות גבוהה של 12 סיביות 5Msps, מגבר תפעולי עצמאי בין פס לפס, משווה אנלוגי במהירות גבוהה, DAC של 12 סיביות 1Msps; תמיכה במקור מתח ייחוס עצמאי בקלט חיצוני, מקש מגע קיבולי רב-ערוצי; בקר DMA במהירות גבוהה.
תמיכה בקלט שעון קריסטל פנימי RC או חיצוני, איפוס אמינות גבוהה.
שעון RTC בזמן אמת עם כיול מובנה, תמיכה בלוח שנה תמידי לשנה מעוברת, אירועי אזעקה, השכמה תקופתית.
תמיכה במונה תזמון דיוק גבוה.
מאפייני אבטחה ברמת חומרה: מנוע האצת חומרה של אלגוריתם הצפנה, תמיכה באלגוריתמים AES, DES, TDES, SHA1/224/256, SM1, SM3, SM4, SM7, MD5; הצפנת אחסון פלאש, ניהול מחיצות מרובות משתמשים (MMU), מחולל מספרים אקראיים אמיתי של TRNG, פעולת CRC16/32; תמיכה בהגנה מפני כתיבה (WRP), רמות הגנה מרובה קריאה (RDP) (L0/L1/L2); תמיכה באתחול אבטחה, הורדת הצפנת תוכניות, עדכון אבטחה.
תמיכה בניטור כשל בשעון ובניטור נגד הריסה.
UID של 96 סיביות ו-UCID של 128 סיביות.
סביבת עבודה אמינה ביותר: 1.8V ~ 3.6V/-40℃ ~ 105℃.
(3) דפוס תעשייתי
מערכת בקרת שטח גוף הרכב נמצאת בשלבי צמיחה מוקדמים עבור מפעלים זרים ומקומיים כאחד. מפעלים זרים כמו BCM, PEPS, דלתות וחלונות, בקרי מושבים ומוצרים חד-פונקציונליים אחרים נהנים מצטברות טכנית עמוקה, בעוד שלחברות הזרות הגדולות יש כיסוי רחב של קווי מוצרים, מה שמניח את היסודות עבורן לבצע מוצרי אינטגרציה מערכתית. מפעלים מקומיים נהנים מיתרונות מסוימים ביישום מרכב רכב אנרגיה חדשה. קחו לדוגמה BYD, ברכב האנרגיה החדש של BYD, שטח הגוף מחולק לאזורים שמאל וימין, ותוצר אינטגרציית המערכת מסודר ומוגדר מחדש. עם זאת, מבחינת שבבי בקרת שטח גוף הרכב, הספק העיקרי של מיקרו-בקר הוא עדיין Infineon, NXP, Renesas, Microchip, ST ויצרני שבבים בינלאומיים אחרים, וליצרני שבבים מקומיים יש כיום נתח שוק נמוך.
(4) חסמים בתעשייה
מנקודת מבט של תקשורת, ישנו תהליך האבולוציה של ארכיטקטורה מסורתית - ארכיטקטורה היברידית - פלטפורמת מחשב הרכב הסופית. השינוי במהירות התקשורת, כמו גם הפחתת מחירי כוח המחשוב הבסיסי עם בטיחות פונקציונלית גבוהה, הם המפתח, וניתן לממש בהדרגה את התאימות של פונקציות שונות ברמה האלקטרונית של הבקר הבסיסי בעתיד. לדוגמה, בקר שטח המרכב יכול לשלב פונקציות BCM, PEPS ו- anti-pinch מסורתיות. באופן יחסי, המחסומים הטכניים של שבב בקרת שטח המרכב נמוכים יותר מאשר אזור ההספק, אזור תא הטייס וכו', וצפויים שבבים מקומיים להוביל את פריצת הדרך הגדולה בתחום המרכב ולהגשים בהדרגה תחליף מקומי. בשנים האחרונות, מיקרו-בקר מקומי בשוק הרכבות קדמיות ואחוריות בתחום המרכב חווה תנופה טובה מאוד של פיתוח.
שבב בקרת תא הטייס
חשמול, בינה ורשתות האיצו את התפתחות הארכיטקטורה האלקטרונית והחשמלית של הרכב לכיוון של בקרת תחום, וגם תא הטייס מתפתח במהירות ממערכת בידור שמע ווידאו של הרכב לתא הטייס החכם. תא הטייס מוצג עם ממשק אינטראקציה בין אדם למחשב, אך בין אם מדובר במערכת המידע והבידור הקודמת או בתא הטייס החכם הנוכחי, בנוסף ל-SOC חזק עם מהירות מחשוב, הוא זקוק גם ל-MCU בזמן אמת גבוה כדי להתמודד עם האינטראקציה של הנתונים עם הרכב. הפופולריות ההדרגתית של כלי רכב מוגדרי תוכנה, OTA ו-Autosar בתא הטייס החכם הופכת את הדרישות למשאבי MCU בתא הטייס לגבוהות יותר ויותר. הדבר משתקף במיוחד בביקוש הגובר לקיבולת FLASH ו-RAM, וגם הביקוש לספירת PIN עולה, פונקציות מורכבות יותר דורשות יכולות חזקות יותר של ביצוע תוכניות, אך גם ממשק אפיק עשיר יותר.
(1) דרישות התפקיד
מיקרו-בקר באזור תא הנוסעים מממש בעיקר פונקציות ניהול צריכת חשמל של המערכת, ניהול תזמון הפעלה, ניהול רשת, אבחון, אינטראקציה עם נתוני רכב, ניהול מפתחות ותאורה אחורית, ניהול מודולי DSP/FM שמע, ניהול זמן מערכת ופונקציות אחרות.
דרישות משאבי מיקרו-בקר:
· לתדר הראשי וכוח המחשוב יש דרישות מסוימות, התדר הראשי אינו פחות מ-100 מגה-הרץ וכוח המחשוב אינו פחות מ-200DMIPS;
· שטח אחסון פלאש אינו פחות מ-1MB, עם מחיצה פיזית של קוד פלאש ופלאש נתונים;
· זיכרון RAM לא פחות מ-128KB;
· דרישות רמת בטיחות פונקציונלית גבוהה, יכולות להגיע לרמת ASIL-B;
· תמיכה ב-ADC רב-ערוצי;
· תמיכה ב-CAN-FD רב-ערוצי;
· תקן רכב דרגה AEC-Q100 דרגה 1;
· תמיכה בשדרוג מקוון (OTA), תמיכה בפלאש עם בנק כפול;
· נדרש מנוע הצפנת מידע ברמה SHE/HSM-light ומעלה כדי לתמוך בהפעלה בטוחה;
· מספר ה-PIN אינו פחות מ-100 PIN;
(2) דרישות ביצועים
IO תומך באספקת חשמל במתח רחב (5.5v ~ 2.7v), יציאת IO תומכת בשימוש במתח יתר;
כניסות אותות רבות משתנות בהתאם למתח של סוללת ספק הכוח, וייתכן שיתעורר מתח יתר. מתח יתר יכול לשפר את יציבות ואמינות המערכת.
חיי זיכרון:
מחזור החיים של המכונית הוא יותר מ-10 שנים, ולכן אחסון התוכניות ואחסון הנתונים של המיקרו-בקר של המכונית צריכים להיות בעלי אורך חיים ארוך יותר. אחסון התוכניות ואחסון הנתונים צריכים להיות בעלי מחיצות פיזיות נפרדות, ואחסון התוכניות צריך להימחק פחות פעמים, כך שסבולת > 10K, בעוד שאחסון הנתונים צריך להימחק בתדירות גבוהה יותר, ולכן נדרש מספר רב יותר של זמני מחיקה. עיין במחוון הבהוב הנתונים. סבולת > 100K, 15 שנים (<1K). 10 שנים (<100K).
ממשק אפיק תקשורת;
עומס התקשורת באוטובוס על הרכב הולך וגובר, כך ש-CAN CAN המסורתי כבר לא עומד בדרישת התקשורת, הדרישה לאפיק CAN-FD במהירות גבוהה הולכת וגוברת, התמיכה ב-CAN-FD הפכה בהדרגה לתקן מיקרו-בקר.
(3) דפוס תעשייתי
נכון לעכשיו, שיעור המיקרו-בקרים החכמים המקומיים עדיין נמוך מאוד, והספקים העיקריים הם עדיין NXP, Renesas, Infineon, ST, Microchip ויצרני מיקרו-בקרים בינלאומיים אחרים. מספר יצרני מיקרו-בקרים מקומיים כבר נמצאים בפריסה, אך ביצועי השוק נותרו לראות.
(4) חסמים בתעשייה
רמת הרגולציה של רכבי נוסעים חכמים ורמת הבטיחות התפקודית אינן גבוהות מדי, בעיקר בגלל הצטברות ידע והצורך באיטרציות ושיפור מתמידים של המוצר. יחד עם זאת, מכיוון שאין הרבה קווי ייצור של מיקרו-בקרים במפעלים מקומיים, התהליך מפגר יחסית, ולוקח זמן להגיע לשרשרת האספקה הארצית של הייצור, וייתכנו עלויות גבוהות יותר, ולחץ התחרות עם יצרנים בינלאומיים גדול יותר.
יישום של שבב בקרה ביתי
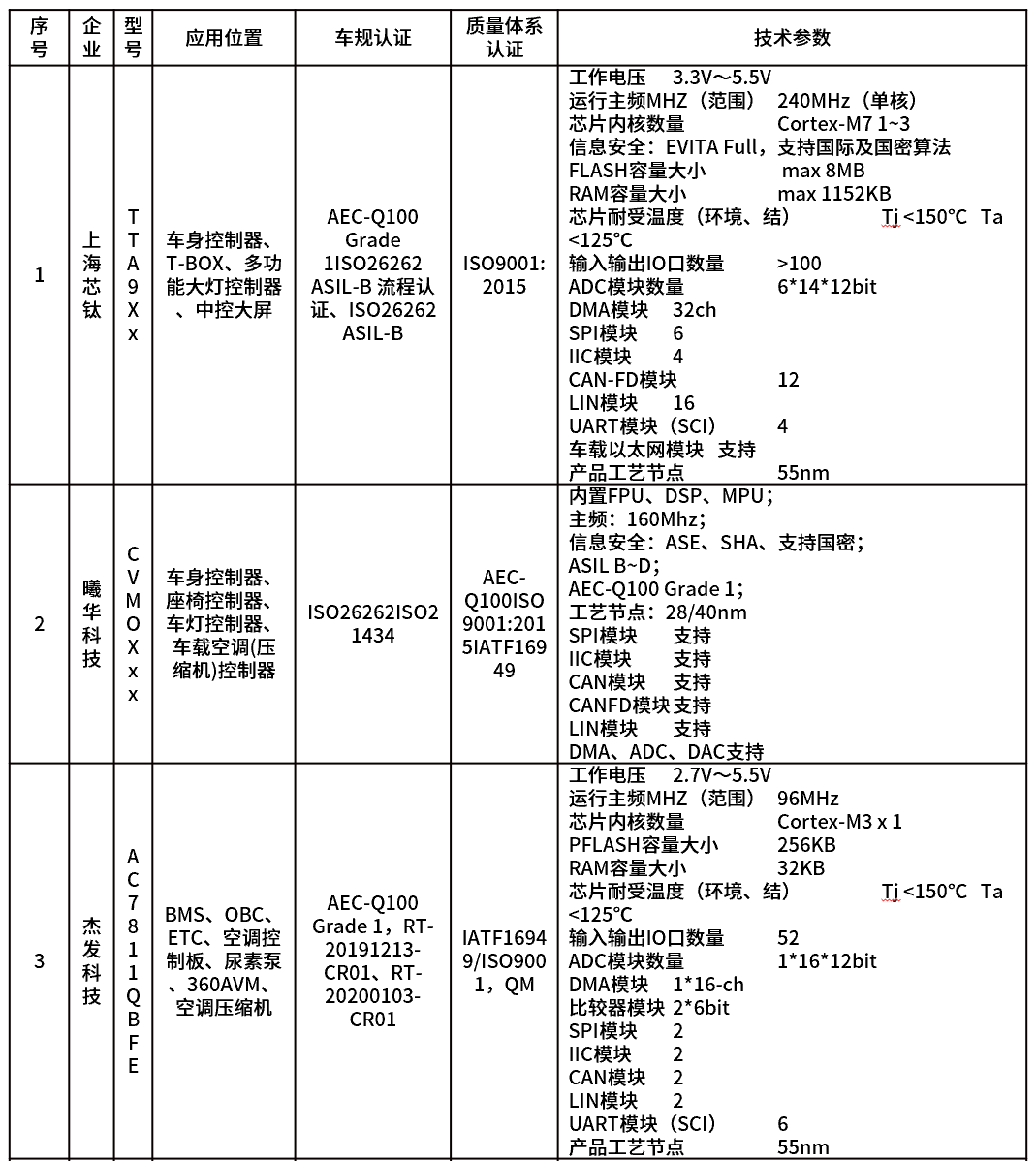
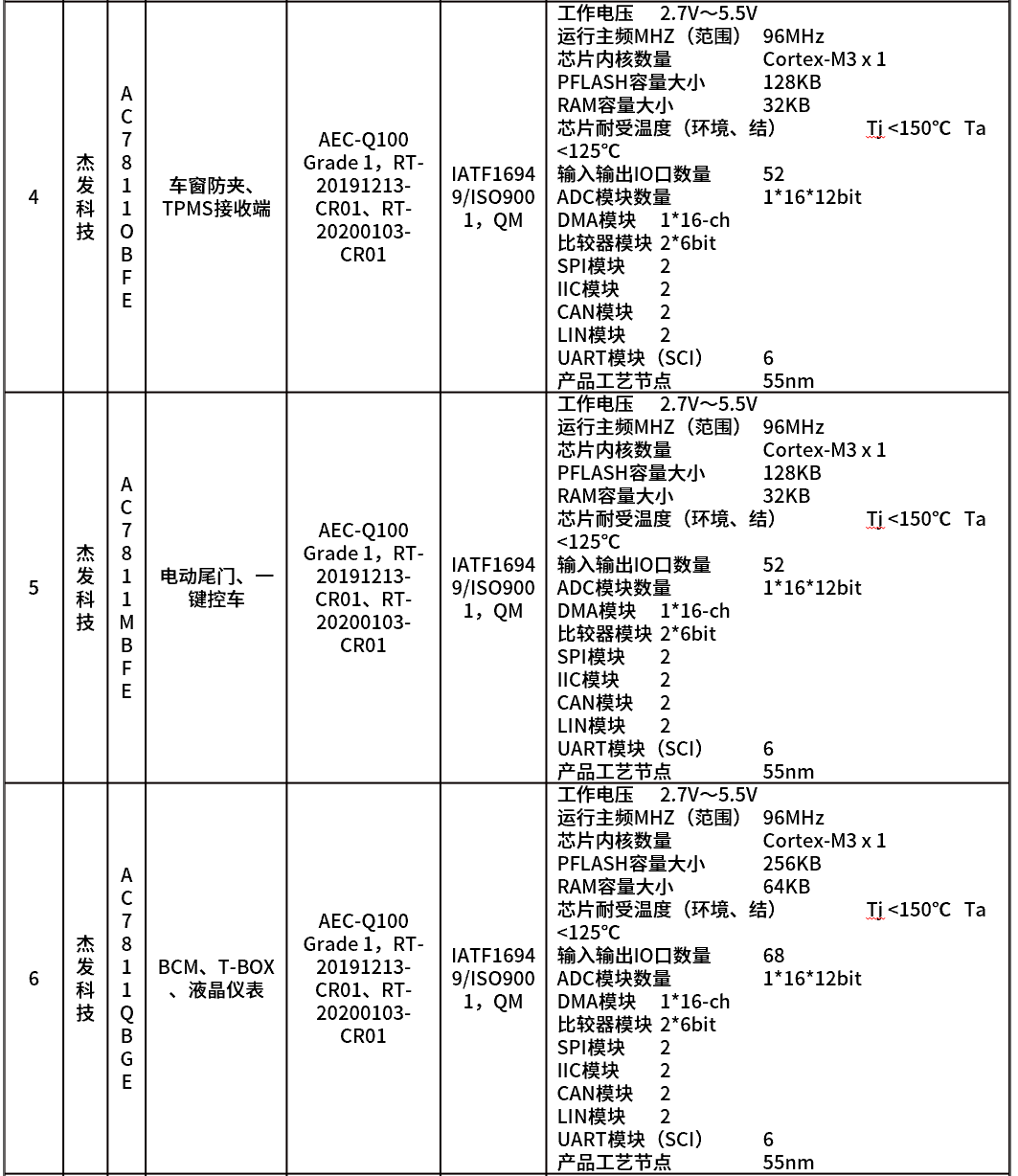
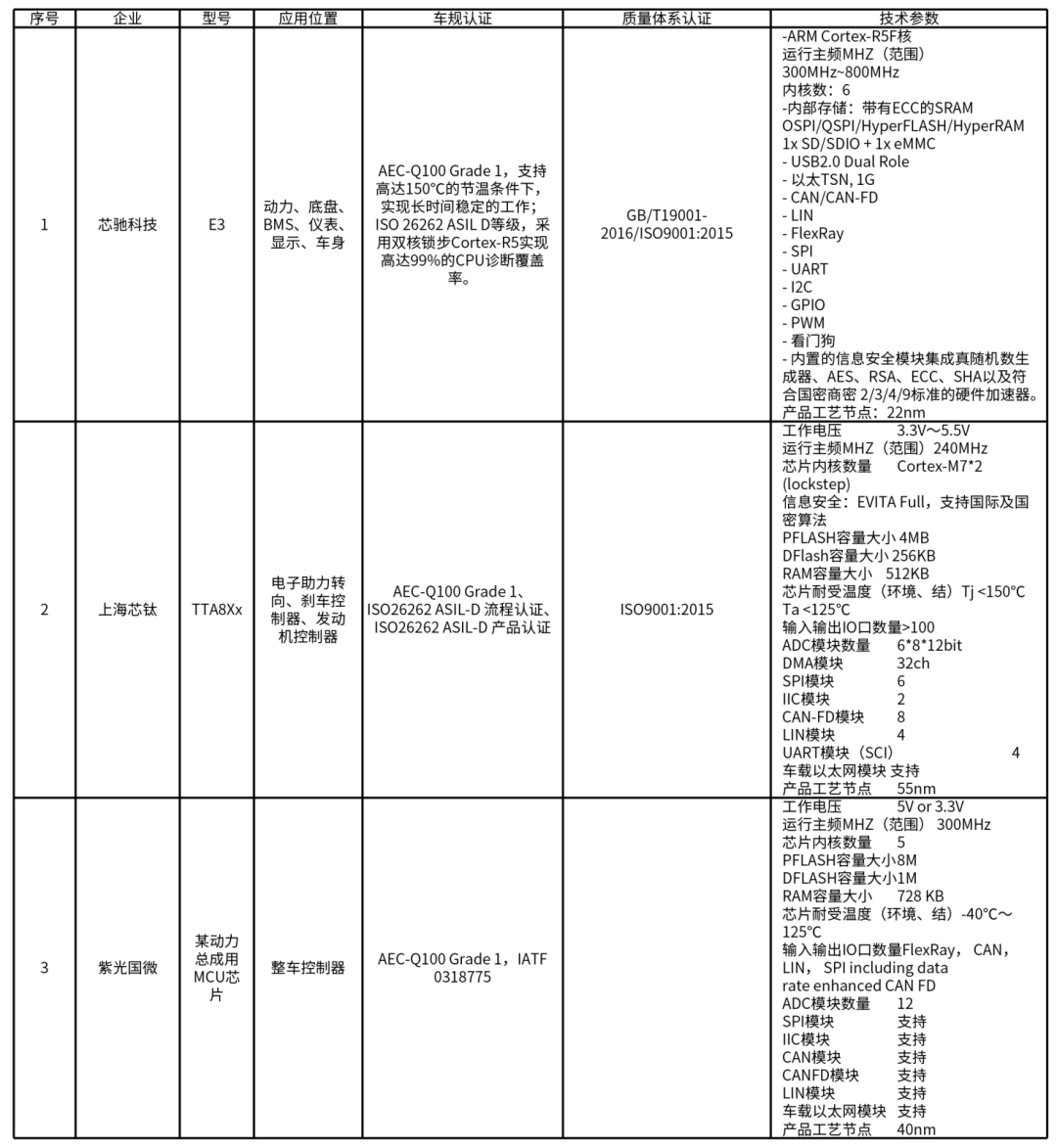
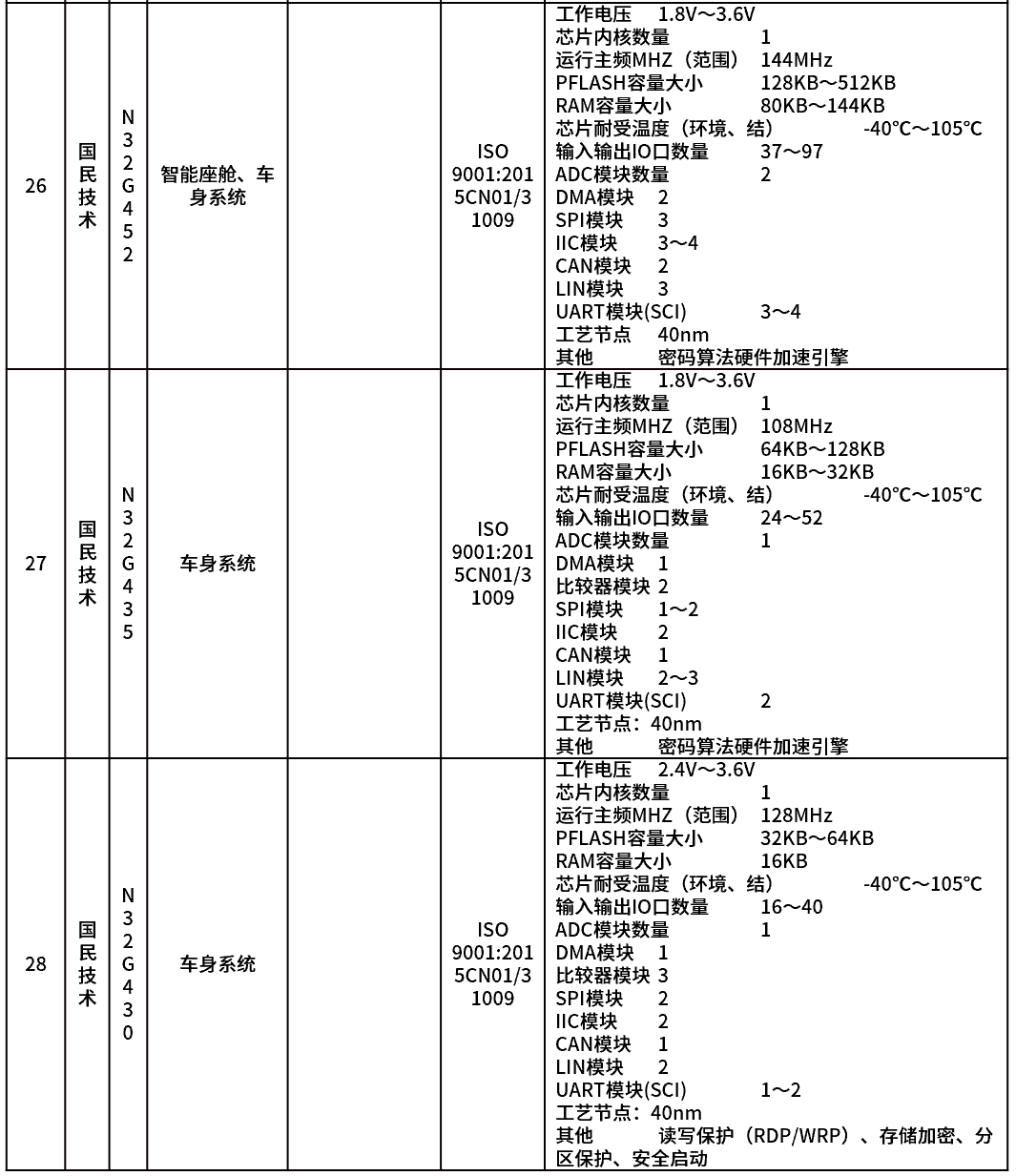
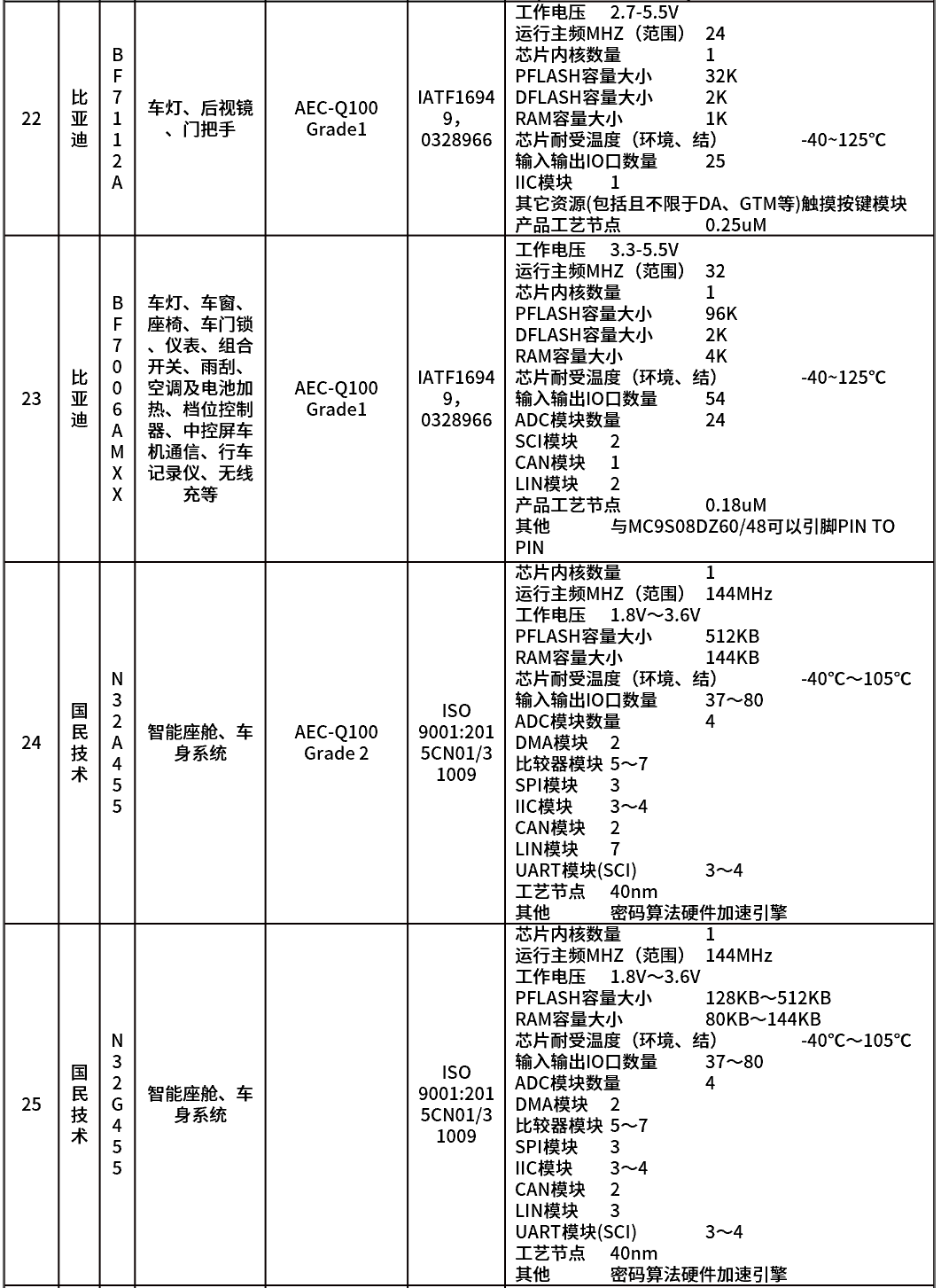
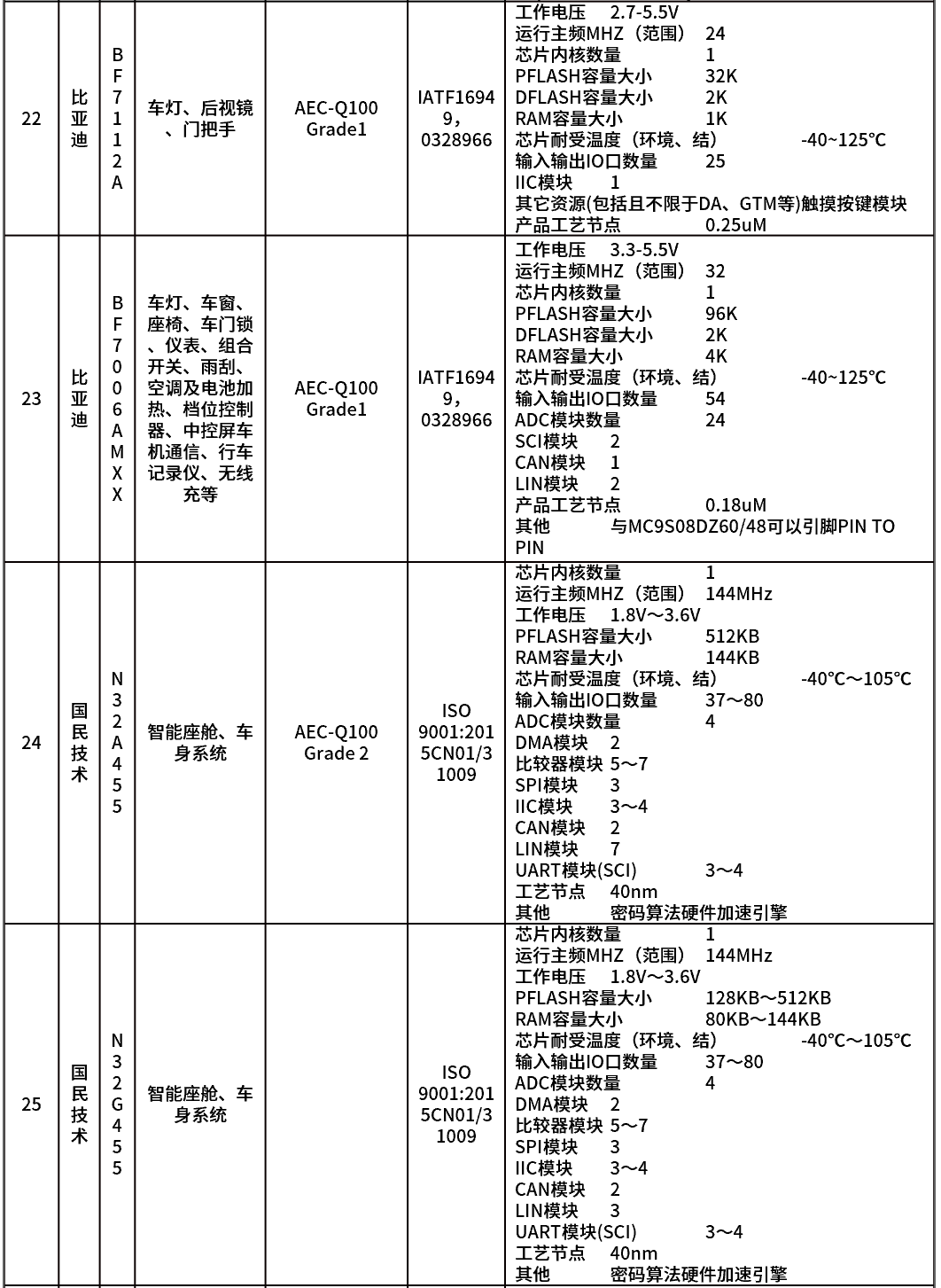
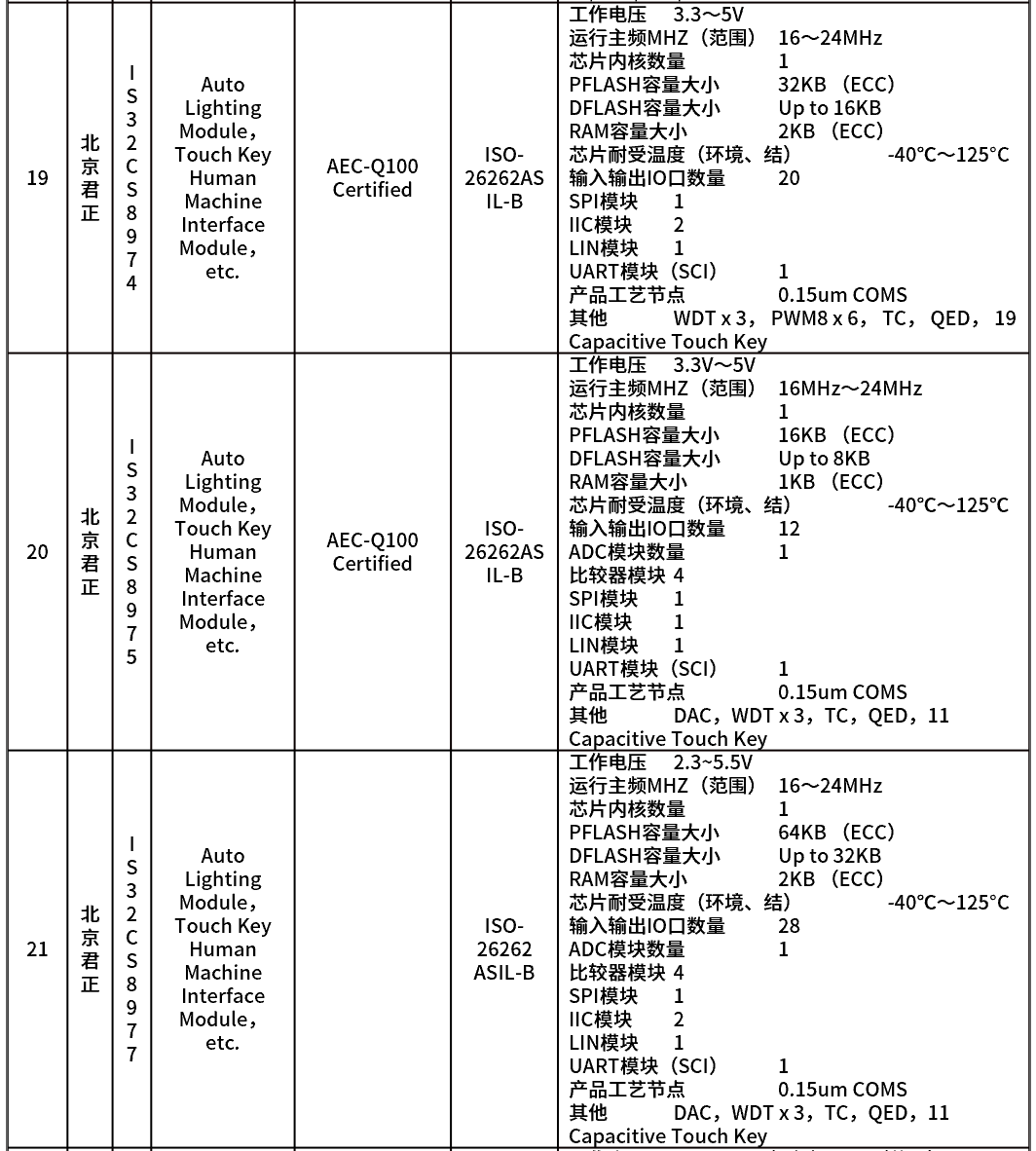
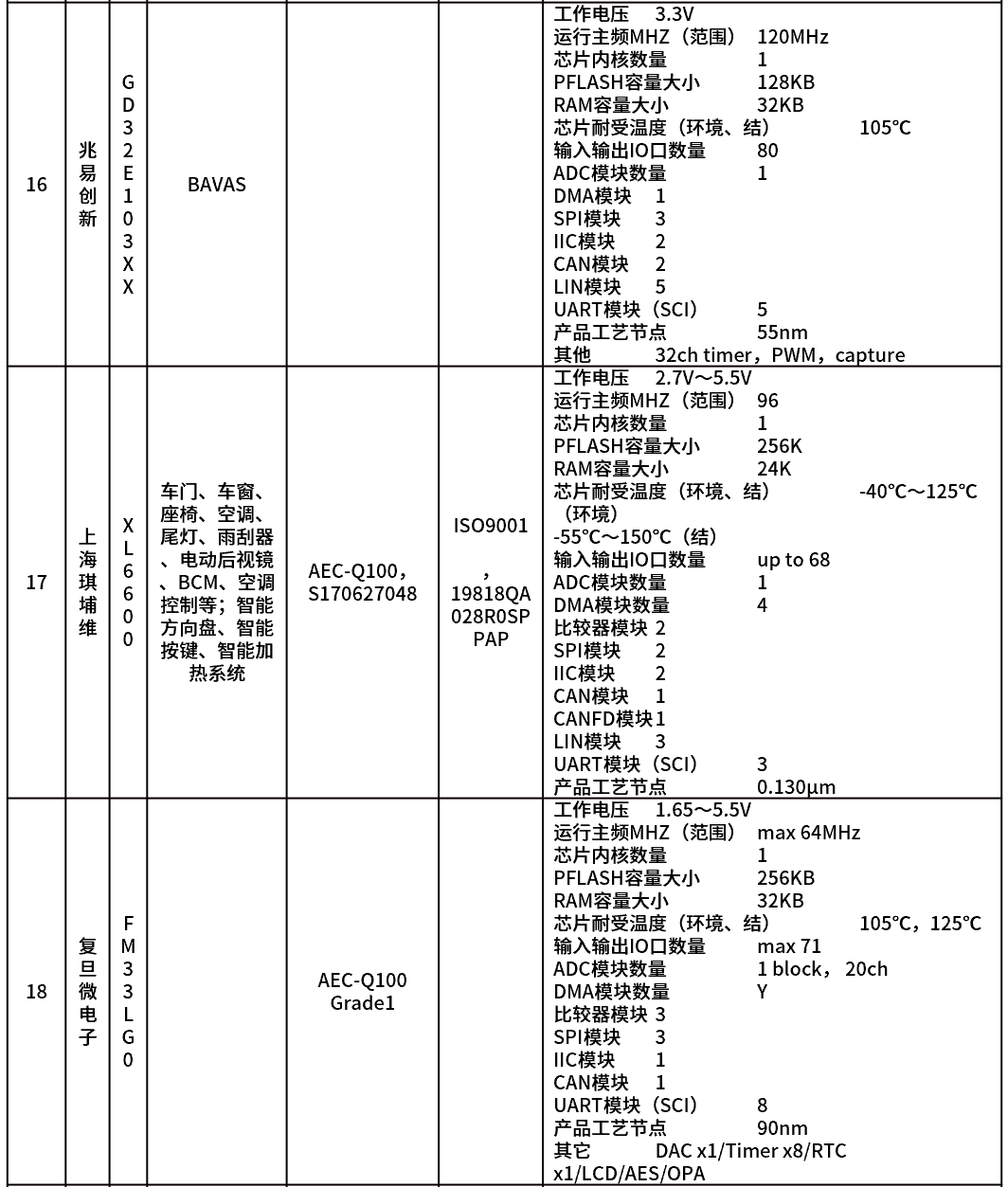
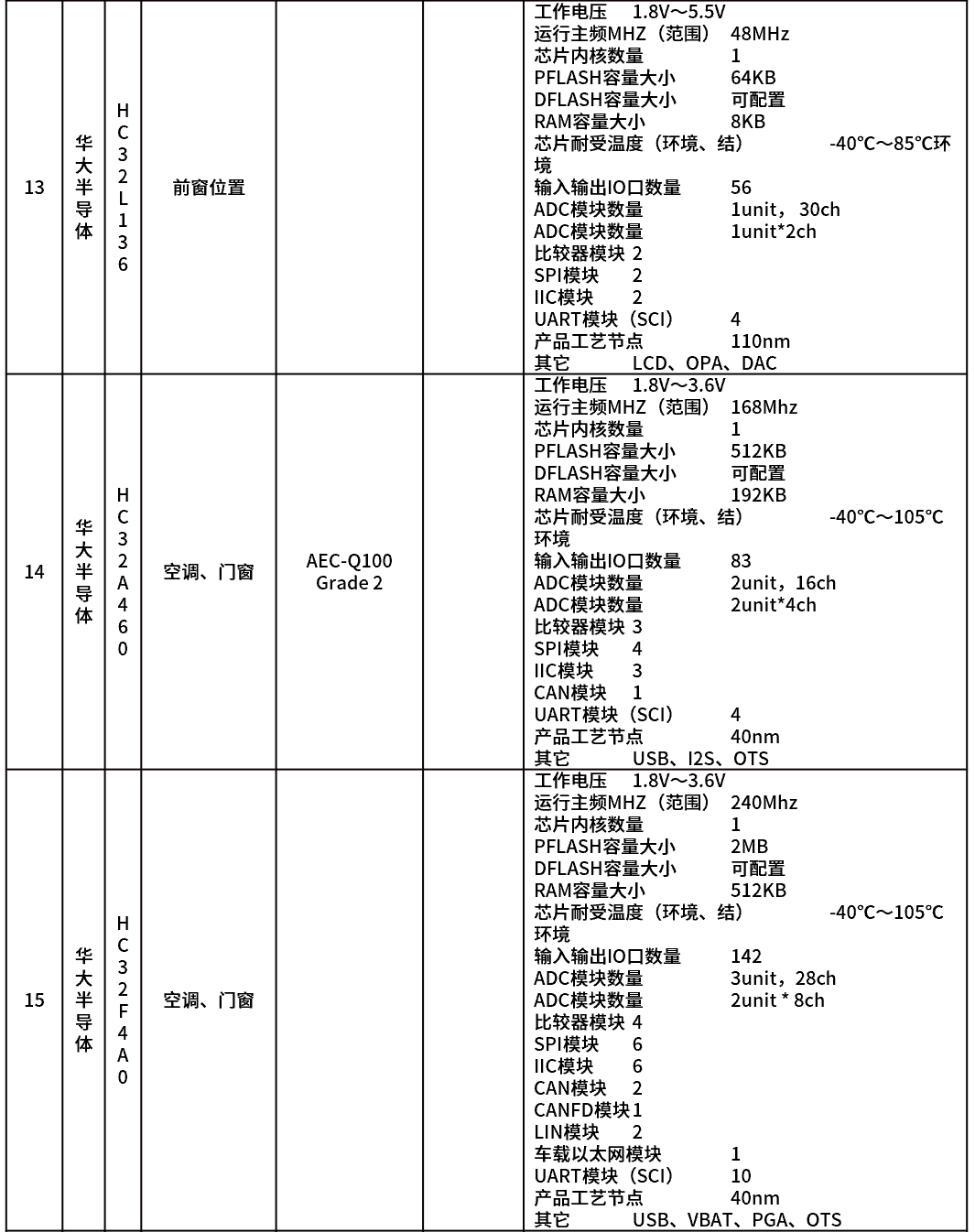
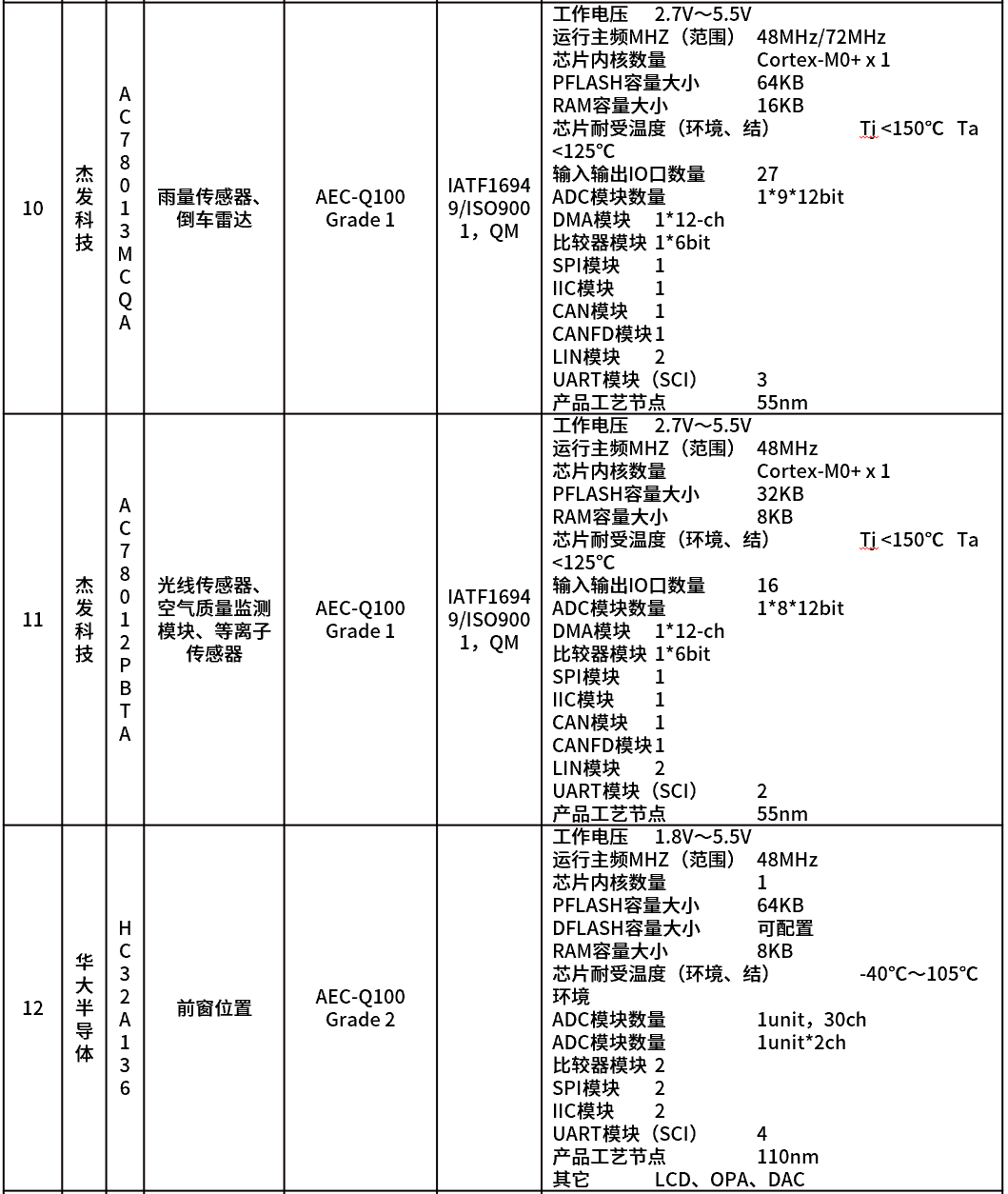
שבבי בקרת רכב מבוססים בעיקר על מיקרו-בקר לרכב. חברות מובילות מקומיות כמו Ziguang Guowei, Huada Semiconductor, Shanghai Xinti, Zhaoyi Innovation, Jiefa Technology, Xinchi Technology, Beijing Junzheng, Shenzhen Xihua, Shanghai Qipuwei, National Technology וכו', לכולם יש רצפי מוצרים של מיקרו-בקר בקנה מידה של רכב, מוצרים של ענקיות מעבר לים, המבוססים כיום על ארכיטקטורת ARM. חברות מסוימות ביצעו גם מחקר ופיתוח של ארכיטקטורת RISC-V.
כיום, שבב תחום בקרת הרכב המקומי משמש בעיקר בשוק הטעינה הקדמית של הרכב, והוא יושם על מכוניות בתחום המרכב והמידע והבידור, בעוד שבתחום השלדה, החשמל ותחומים אחרים, הוא עדיין נשלט על ידי ענקיות שבבים מחו"ל כמו stmicroelectronics, NXP, Texas Instruments ו-Microchip Semiconductor, ורק מעט מפעלים מקומיים מימשו יישומי ייצור המוני. נכון לעכשיו, יצרנית השבבים המקומית Chipchi תשחרר מוצרים מסדרת E3 של שבבי בקרה בעלי ביצועים גבוהים המבוססים על ARM Cortex-R5F באפריל 2022, עם רמת בטיחות פונקציונלית שתגיע ל-ASIL D, רמת טמפרטורה התומכת ב-AEC-Q100 Grade 1, תדר מעבד עד 800MHz, עם עד 6 ליבות מעבד. זהו המוצר בעל הביצועים הגבוהים ביותר ב-MCU של מדי רכב הקיים לייצור המוני, וממלא את הפער בשוק MCU של מדי רכב ברמה גבוהה ובטיחותית מקומית, עם ביצועים גבוהים ואמינות גבוהה, וניתן להשתמש בו ב-BMS, ADAS, VCU, שלדות by-wire, מכשירים, HUD, מראות אחוריות חכמות ותחומי בקרת רכב מרכזיים אחרים. יותר מ-100 לקוחות אימצו את E3 לעיצוב מוצרים, כולל GAC, Geely וכו'.
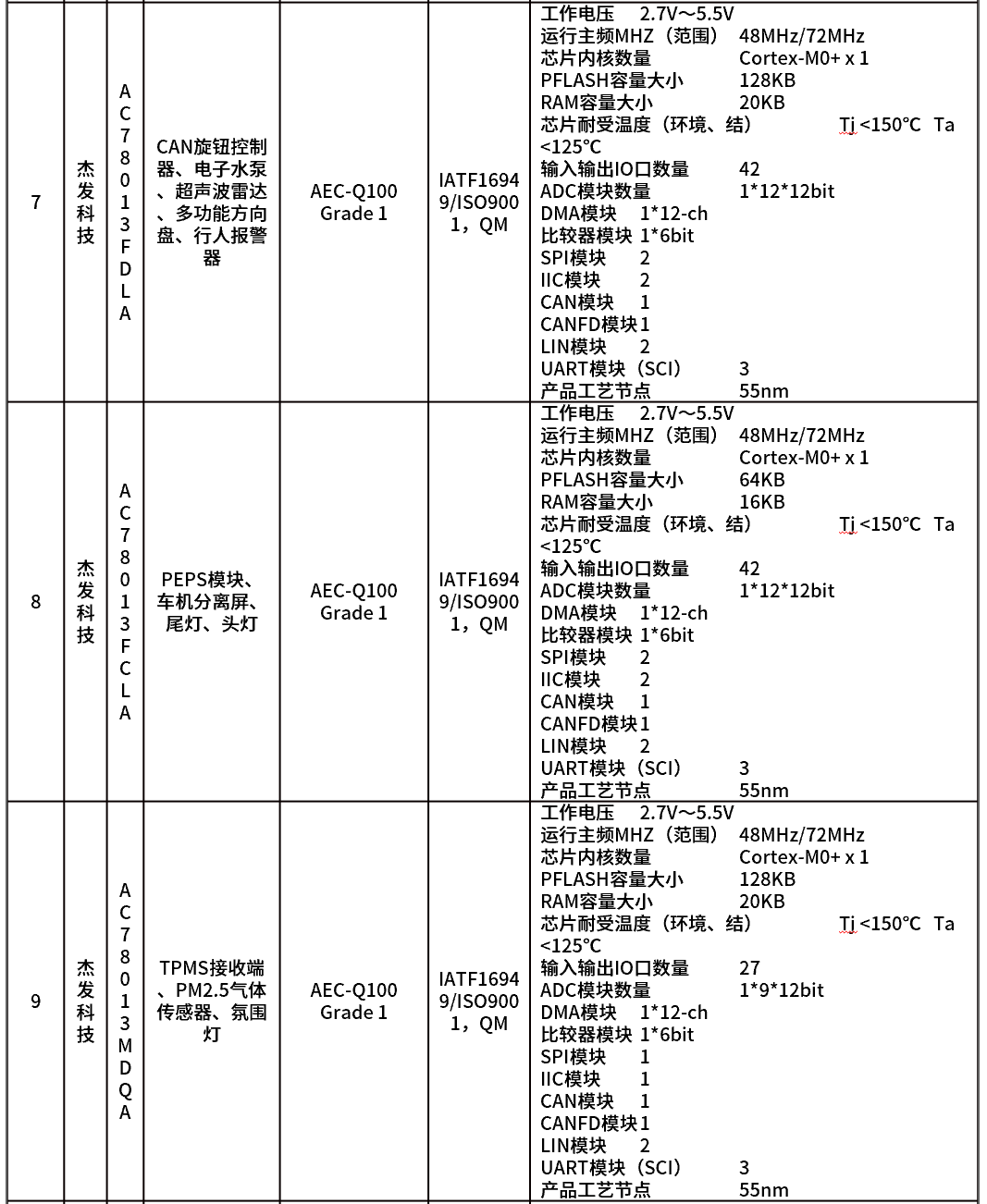
יישום של מוצרי ליבה של בקר ביתי
זמן פרסום: 19 ביולי 2023





