


DAPLINK מחליף את אמולטור הורדת המבער JLINK OBSTLINK STM32 ARM
מאפייני מוצר
(1) לוח מעגל מודפס סכמטי לחומרה הוא בקוד פתוח לחלוטין, תוכנה בקוד פתוח, ללא סיכון זכויות יוצרים.
כיום, ה-jlink/stlink בשוק הם פיראטיים, וישנן מספר בעיות משפטיות בשימוש. כאשר משתמשים בחלק מ-jlink עם IDE כגון MDK, הדבר יגרום לפיראטיות ולא ניתן להשתמש בו כרגיל, ובחלק מגרסאות ה-jlink יש בעיה של אובדן קושחה לאחר שימוש למשך זמן מה. לאחר אובדן הקושחה, יש צורך לשחזר את התוכנה באופן ידני.
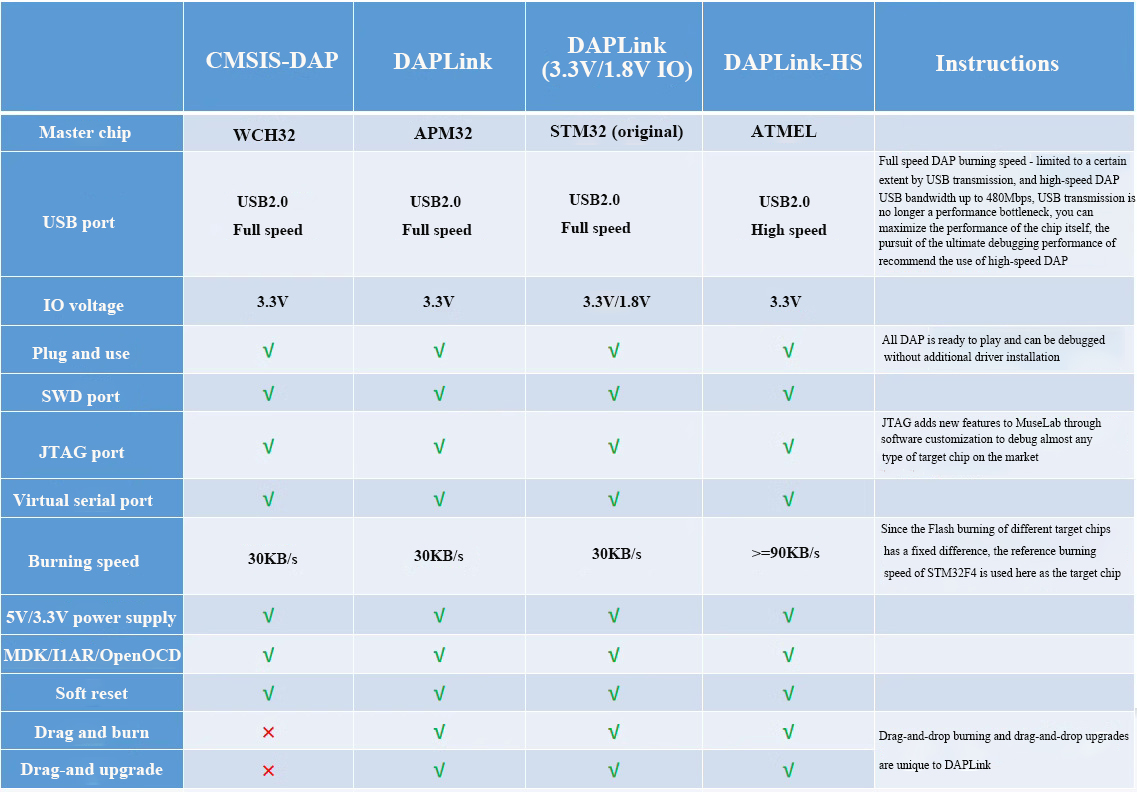
(2) ממשק SWD מוביל, תומך בתוכנת ניפוי שגיאות למחשבים מרכזיים, כולל keil, IAR, openocd, תומך בהורדת SwD, ניפוי שגיאות בשלב אחד.
(3) ממשק JTAG, עם openocd יכול לתמוך בניפוי שגיאות של כמעט כל שבבי SoC ברחבי העולם, כגון סדרת ARM Cortex-A, DSP, FPGA, MIPS וכו', מכיוון שפרוטוקול SWD הוא רק פרוטוקול פרטי המוגדר על ידי ARM, ו-JTAG הוא התקן הבינלאומי IEEE 1149. שבב היעד הרגיל לאמולטור הוא בדרך כלל סדרת ARM Cortex-M, שאינה כוללת ממשק JTAG, ומוצר זה מציג ממשק JTAG, המתאים לך לפיתוח וניפוי שגיאות תחת פלטפורמות אחרות.
(4) תמיכה ביציאה טורית וירטואלית (כלומר, ניתן להשתמש בה כאמולטור או ככלי יציאה טורית, החלפת ch340, cp2102, p12303)
(5) DAPLink תומך בשדרוג קושחה של כונן הבזק מסוג USB, פשוט חברו את ה-nRST לקרקע, חברו אותו ל-DAPLink, למחשב. יהיה כונן הבזק מסוג USB, פשוט גררו את הקושחה החדשה (קובץ hex או bin) לכונן ההבזק מסוג USB כדי להשלים את שדרוג הקושחה. מכיוון ש-DAPLink מיישם טוען אתחול עם פונקציית דיסק U, הוא יכול להשלים בקלות את שדרוג הקושחה. אם יש לכם מוצר מבוסס STM32 בייצור המוני, וייתכן שיהיה צורך לשדרג את המוצר בהמשך, קוד טוען האתחול ב-DAPLink ראוי מאוד לעיון, הלקוח אינו צריך להתקין כלי IDE או צריבה מורכבים כדי להשלים את השדרוג, פשוט גררו אותו לדיסק U כדי להשלים את שדרוג המוצר בנוחות.
הליך חיווט
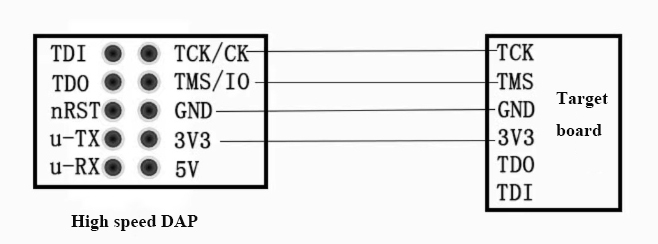
1. חבר את האמולטור ללוח היעד
תרשים חיווט SWD
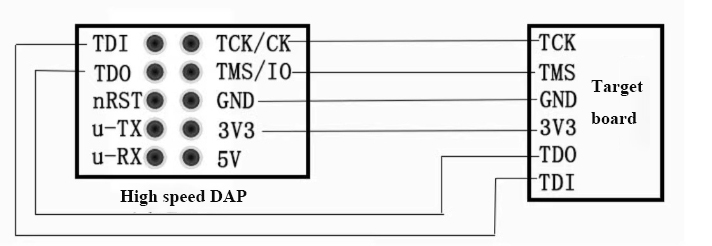
דיאגרמת חיווט JTAG
שאלות ותשובות
1. כשל צריבה, המצביע על שגיאת RDDI-DAP, כיצד לפתור?
א: מכיוון שמהירות הצריבה של הסימולטור מהירה, האות בין קו הדופונט יפיק קשר בין שני האותות (crosstalk), אנא נסה לשנות את קו הדופונט הקצר יותר, או את קו הדופונט המחובר היטב, אתה יכול גם לנסות להפחית את מהירות הצריבה, בדרך כלל ניתן לפתור זאת כרגיל.
2. מה יש לעשות אם לא ניתן לזהות את המטרה, דבר המצביע על כשל בתקשורת?
א: אנא בדקו תחילה האם כבל החומרה תקין (GND, CLK, 10, 3V3), ולאחר מכן בדקו האם ספק הכוח של לוח היעד תקין. אם לוח היעד מופעל על ידי הסימולטור, מכיוון שזרם הפלט המרבי של ה-USB הוא רק 500mA, אנא בדקו האם ספק הכוח של לוח היעד אינו מספיק.
3. איזו צריבת ניפוי שגיאות שבבים נתמכת על ידי CMSIS DAP/DAPLink?
א: תרחיש השימוש הטיפוסי הוא תכנות וניפוי שגיאות ב-MCU. תיאורטית, הליבה של סדרת Cortex-M יכולה להשתמש ב-DAP לצורך צריבה וניפוי שגיאות, שבבים אופייניים כגון סדרת STM32 המלאה של שבבים, סדרת GD32 המלאה, סדרת nRF51/52 וכן הלאה.
4. האם ניתן להשתמש באמולטור DAP לצורך ניפוי שגיאות תחת לינוקס?
א: תחת לינוקס, ניתן להשתמש ב-Openocd ובאמולטור DAP לצורך ניפוי שגיאות. Openocd הוא ניפוי השגיאות בקוד פתוח הפופולרי והחזק ביותר בעולם. ניתן להשתמש ב-Openocd גם תחת Windows, על ידי כתיבת סקריפט התצורה המתאים ניתן לבצע ניפוי שגיאות של השבב, צריבה ופעולות אחרות.
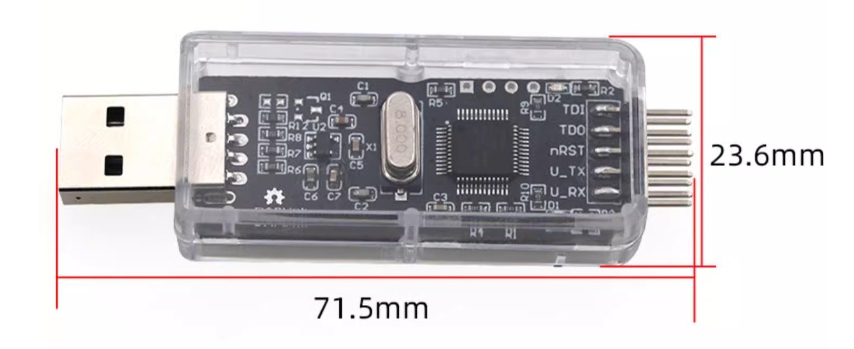
צילום מוצר












-

טֵלֵפוֹן
-

אֶלֶקטרוֹנִי
-

וואטסאפ
-

סקייפ
-

סקייפ
-

סקייפ